







主动式三维测量具有非接触、无损害、灵活性高、实时性、速度快等优势,主动式的光学三维测量根据工作原理的不同可以分成三类:基于激光测距测量法、基于结构光和基于干涉信号等类型。其中基于激光测距测量法:有激光对焦法、飞行时间法(TOF, Time-Of-Flight)、相位调制法、激光雷达(Lidar, Light detection and ranging);
以目前比较经典的测量方法——飞行时间测量法(TOF, Time-Of-Flight)为例,原理如图所示,是利用同一均匀介质中光沿直线传播而且速度恒定这一性质,向待测物体发射激光脉冲,然后探测传感器接收反射激光脉冲,通过计算传感器发送和接收到激光脉冲的时间差,就可以获得待测物体的深度信息。飞行时间法的优点是测量原理简单,系统稳定可靠,测量速度快,测量范围较大,没有测量盲区;缺点是系统易于受到环境光源影响,且分辨率比较低。
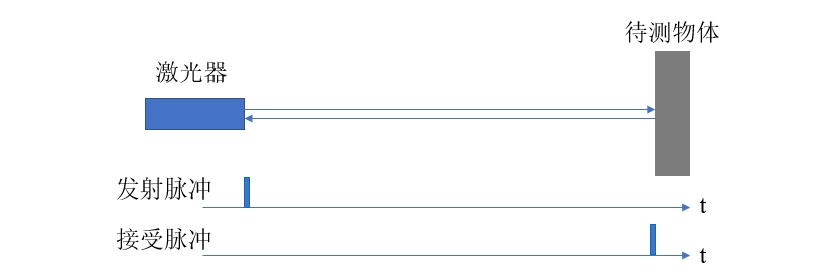
飞行时间法原理示意图